Die Vorlesung Kognitive Systeme am KIT 2012/2013 zusammengefasst von honnel und famalgosner
Kognitive Systeme
Allgemeine Infos
- k-Means Algorithmus aka Clustering
- Phase und Spektrum sind notwendig um ein Bild vollständig zu rekonstruieren
Themen in den Klausuren
Signalverarbeitung
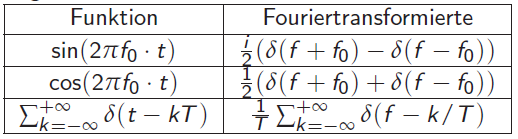
Fouriertransformation
Die muss man drauf haben: 🙁
- Abtasttheorem
- Windowing
- Overlap Processing
- Zeichnen von Spektrum
- x-Achse: Frequenz, y-Achse: Real-Teil, z-Achse: Imaginär-Teil
- Überführen von
f(t)mit Hilfe trigonometrischen Additionsthreorems in eine Form mit n Termen - Bild alle f Hz wiederholen
- Höhe mit f = 1/T multiplizieren (T = 2 in Tabelle oben)
- Zeichnen von Betragsspektrum
- x-Achse: Frequenz, y-Achse:
sqrt(R(F(w))²+I(F(w))²)
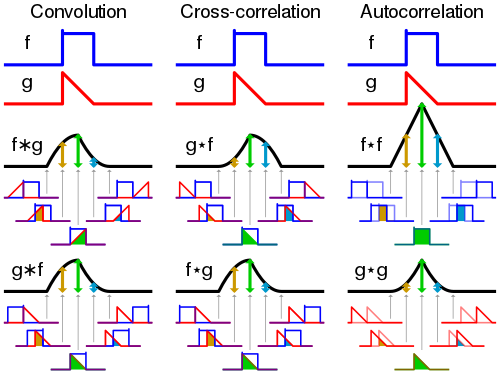
Faltung
{kind=link}
{kind=link}
- Gegeben:
f(x),g(x) - Gesucht:
f(x)*g(x) - Ablauf
- Spiegeln von
f(x) - Durchschieben von
f(x) - Aufsummieren der geschnittenen Flächen
max(f(x)*g(x)) = max. Amplitute(f(x)) * max. Amplitute(g(x)) * Länge(f(x)), Die Länge bezieht sich auch den jeweiligen Peak der gerade durchgeschoben wird- Sonderfall Faltung mit Dirac-Funktion:
- Kopiert andere Funktion und skaliert sie entsprechend Faktor A in
A·δ(x - x_0)
(A = späteres Maximum) - Keine Spiegelung falls f(x) = Dirac
Filter
Tiefpassfilter
Verwendung: Glättung, Rauschelimination
- Mittelwertfilter
1, 1, 1
1/9 * ( 1, 1, 1 )
1, 1, 1 -
Gauß-Filter
- Definiert durch zweidimensionale Gauß-Funktion (dies approximiert durch 3×3-Filter)
1, 2, 1
1/16 * ( 2, 4, 2 )
1, 2, 1
Hochpassfilter
Verwendung: Kantendetektion
- Prewitt
- X-Filter: gute vertikale, schlechte horizontale Kantendetektion
-1, 0, 1
-1, 0, 1
-1, 0, 1
- Y-Filter: schlechte vertikale, gute horizontale Kantendetektion
-1, -1, -1
0, 0, 0
1, 1, 1
- Operator: Kombination aus X- und Y-Filter -> Bestimmung des Grauwertgradientenbetrages
-
Sobel
- X-Filter: gute vertikale, schlechte horizontale Kantendetektion
-1, 0, 1
-2, 0, 2
-1, 0, 1
- Y-Filter: schlechte vertikale, gute horizontale Kantendetektion
-1,-2,-1
0, 0, 0
1, 2, 1
- Operator: Kombination aus X- und Y-Filter -> Bestimmung des Grauwertgradientenbetrages
- Laplace
- gute Kantendetektion
0, 1, 0
1,-4, 1
0, 1, 0
- Aber: sehr anfällig für Bildrauschen, daher vorher oft noch Gauß-Filter zur Glättung (Laplacian of Gaussian)
- Roberts
- gute diagonale Kantendetektion
- Filtermasken
R_x: (-1,0,0,1)R_y: (0,-1,1,0)- Filterfunktion:
|R_x*b[x,y]| + |R_y*b[x,y]|
Unterschied zwischen Prewitt, Sobel und Laplace:
- Prewitt und Sobel erkennen die Steigung der Funktion (erste Ableitung)
- Laplace erkennt die Änderungsrate (zweite Ableitung) -> Detektion sowohl in horizontaler, vertikaler und diagonaler Richtung
Canny-Kantendetektor
Optimale Kantenerkennung, 0 = keine Kante, 255 = Kante
- Gauß-Filter
- Prewitt_X und Prewitt_Y oder Sobel_X und Sobel_Y
- Non-Maximum Supression: Gradient muss lokales Maximum sein bei Betrachtung der zwei direkten Nachbarn entlang der Gradientenrichtung
- Hysterese-Schwellwertverfahren
* Verwendung von 2 Schwellen: low/high
* Pixel wird akzeptiert wenn Gradient über Schwellwert high
* 8 Nachbarn müssen mit Gradient über Schwellwert low liegen
Kombinierte Operatoren
- Laplacian of Gaussian
Schwellwertfilter
Img'(u,v) = q falls Img(u,v) <= T(reshhold)
0 sonst
Maschinelles Lernen
- parametrisches Lernen
- setzt Wahrscheinlichkeitsdichtefunktion voraus, deren Parameter an Hand der Trainingsdaten geschätzt werden (Gauss-Klassifikator)
- nicht-parametrisches Lernen
- setzt keine explizite Funktion voraus, lernt Wahrscheinlichkeiten aus Trainingsdaten (Parzen Fenster, k-nearest-neighbour, Perzeptron,…)
Klassifikation
Bayes Entscheidungstheorie
- Wissen und Bestandteile erklären können
2-Klassen Problem
- Gegeben:
P(A), P(B), P(x|A), P(x|B); Dabei gilt: P(A)+P(B) = 1
a) Man hat Gauß-Verteilungen gegeben für P(x|A), P(x|B)
b) Man hat Plots der Verteilungen gegeben
- Vorgehensweise für a):
- P_error Formel aufstellen (Integrale), Vorfaktoren rausziehen
- Optimalen Schwellwert bestimmen: Gleichsetzen von beiden Fehlerwahrscheinlichkeiten
- Ergebnis von 2 in Formel von 1 einsetzen und Grenzen der Integrale anpassen, sowie auf passenden Form für Sigma-Tabelle bringen (Interal von -∞ bis opt Grenze)
- Vorgehensweise für b):
- P(A) = x * P(B) und P(A) + P(B) = 1 -> P(A) und P(B) bestimmen
- Optimalen Schwellwert graphisch bestimmen: P(A) * P(x|A) und P(B) P(x|B) zeichen (x-Werte bleiben gleich, y-Werte anpassen)
- P_error = Überlappungsfläche der beiden Fehlerwahrscheinlichkeiten
Neuronale Netze
- Overfitting: Überanpassung des Modells an den Datensatz. Es fehlt dann an Generalisierung und Schließen auf Neues funktioniert dann schlecht (Lösung: Anzahl der Interationen beim Trainieren gering halten).
- Generalisierbarkeit: Fähigkeit auch nicht im Training enthaltene Daten richtig zu klassizifieren
- Aufgabentyp: Netz malen aus Graph
(Aufpassen bei manchen Klausuren Aktivierungsfunktion definiter mit<,>dann ist=undefiniert; in andernen Klausuren ist<=und>)
- Lineare Funktionen ablesen und in Ungleichungen der Form
ax+by>=Thetabringen (Theta= y Achsenabschnitt,aundbsind Steigungen aundbsind die Gewichte an den Kanten,Thetaist der Schwellwert eines Perzeptrons- Für nächst höhere Stufe die Ungleichungen mit einander Addieren und 2. wiederholen
- Aufgabentyp: Netz malen aus binärer Funktion
- Hier einfach Primitive zusammenstöpseln
Wissensrepräsentation
Planung
Homogene projektive Geometrie
- Gesamtprojektionsmatrix
P = (K*R|K*t)
Quaternionen
- Roationsmatrix in Quaternion
- SLERP
- Berechnet für t in [0,1] die kürzeste Verbindung auf der 4D-Einheitsphäre zwischen zwei Quaternionen q und r
- Analytisch:
SLERP(q,r,t) = q*(rq^-1)^t
Bildverarbeitung
- Lokale Punktmerkmale = Texturmerkmale
Punktoperatoren
- homogene:
- Img'(u,v) = f(Img(u,v))
- unabhängig von der Position bzw. den Nachbarpixeln
- Implementierung oft als Look-Up-Table
- affine:
- f:[0..q] -> [0..q], x -> ax+b
- a, b legen Funktion fest
- Anwendung:
- Kontrasterhöhung: b=0, a>1
- -verminderung: b=0, a0, a=1
- -verminderung: b<0, a=1 * Invertierung: b=q, a=-1 (q = max. Wert) * Kombinationen:b=-50, a=2 * nicht-affine: * beliebige Abbildungsfunktion f:[0..q] -> [0..q]
- Anwendung: Ausgleich von Sensor-Nichtlinearität, Gewichtung, Binarisierung
- morphologische:
- Erosion: Auswahl verkleinern
- Dilatation: Auswahl vergrößern
- Öffnen-Operation: Erosion -> Dilatation
- Schließen-Operation: Dilatation -> Erosion
Automatische Kontrastanpassung
Grauwerthistogramm
- Häufigkeit eines Grauwerts im Bild
H(x) = #(u,v):I(u,v) = x, x in [0..q-1]
Spreizung
- Berechnet min/max-Werte und bildet diese linear auf [0..255] ab.
- Nur sinnvoll wenn 0 und 255 noch nicht vorkommen! (nicht robust)
- Kann als eine affine Punktoperation ausgedrückt werden
- Abbildungsvorschrift:
I(u,v) – min
I'(u,v) = q * _____________
max – min
Histrogrammausdehnung
- Verbesserung der Spreizung
- Statt min/max Intensität, Quantile und tatsächliche Maxima erkennen
- Affine Punktopertion
- Erfahrungsgemäß gute Werte sind das 0.1-Quantil und das 0.9-Quantil.
- Vorgehensweise:
- Histogramm bestimmen
- Akkumuliertes Histogramm bestimmen
* Quantile Berechnen
* Histogrammdehnung bestimmen (Affine Punktoperation: I = aX+b)
Histogrammausgleich
- Gleichverteilung im gesamten zur Verfügung stehenden Wertebereich
- Häufige Grauwerte werden auseinandergezogen, weniger häufige zusammengeschoben
- Vorgehensweise:
- Histogramm bestimmen
- Akkumuliertes Histogramm bestimmen
* H_n(x) = |q* H_a(x)/H_a(q)|, H_n = H_normiert, H_a = H_akkumuliert
* Kann zu einer Kontrastminderung führen:
* (0,255) -> (0,127)
Segmenierung: Punktmerkmal
Sum of squared Differences (SSD)
Wird minimal (=0) bei guter Übereinstimmung
Zero Mean Normalized Cross-Correlation (ZNCC)
Wird maximal (=1)bei guter Übereinstimmung
Iterative Endpoint Fit
Hough-Transformation
- Ziel: Erkennung gerader Linien im Bild
- Ansatz Stelle Linie durch Normalenvektor in Polarkoordination dar
- Kurven für kollineare Punkte schneiden sich in genau 2 Punkten
r = x cos(phi) + y sin(phi)
Stereokameras
- Epipolzeugs
Transformation
Sprachverarbeitung
Spracherzeugung
- Anregung
- Lunge: Erzeugung von Luftstrom
- Larynx: Schwingung, Modulation eines periodischen Luftstroms
- Vokaltrakt: Artikulation, Klangcharakter eines Phonems
- Bei konstanter Vokaltraktkonfiguration kann durch Änderung der Anregungsfrequenz (Larynx) unterschiedliche Tonhöhen erzeugen
Vokale
Frequenzpeaks in Transferfunktion
- i : 300, 2300Hz
- a: 750, 1200Hz
- u: 350, 800Hz
Allgemeines
- Phonem
- Ein Phonem ist ein Laut der für eine Sprache notwendig ist. Im Deutschen gäbe es also z.B. langes und kurzes a, stimmhaftes s etc. Z.B. stehen in einem Englischwörterbuch immer die Phoneme dabei (/th e/ etc.).
-
Formanten
- Jedes Phonem hat charakteristische Grundfrequenzen, die sogenannten Formanten
- Maximum in den Vielfachen der Grundfrequenz
- Als Formanten werden die Resonanzfrequenzen der Vokaltrakt Transfer Funktion für eine bestimmte Konfiguration bezeichnet
- Können stimmhaft oder stimmlos sein, können an deren Spektrum unterschieden werden
-
Die ersten beiden Formaten reichen aus um ein Vokal zu erkennen
-
Vokaldreieck
-
Trägt man 1. und 2. Formante auf x- und y-Achse auf kann man alle Vokale voneinander unterscheiden. Insgesamt bilden die Vokale dabei ein Dreieck, deshalb Vokaldreieck.
-
Frikative
- Frikative sind eine Untergruppe der Phoneme, genau wie Vokale und Konsonanten. Frikative sind die sogenannten Reibelaute.

Frontend = Vorverarbeitung
- Anti-Aliasing
- AD Wandlung
- Windowing
- FFT
- Energiespektrum bestimmen
- Ziele: Geschwindigkeit, Genauigkeit
Speech Recognition
- Gegeben: Akustische Daten
A - Gesucht: Wordsequenz
W - Lösungsansatz: basiert auf Bayes,
P(W|A)maximal
Acoustic Model
- HMM’s gehen nicht
- Neuronale Netze (bzw. Hierachien von NNs) oder
- Mixture Gaussians
Dictionaries
- Word Dictionaries
- Phonetic Dictionaries
- Tree Structured Dictionaries (Faster Search)
Language Models
- Grammatik-basiert
- Vorteile
- Lange Historie, größerer Context
- Keine große Textdatenbank notwendig (Rapid Prototyping)
- Nachteile
- Viel Arbeit um Grammatik zu schreiben
- Sehr strikt: Kann nur programmierte Regeln erkennen
-
N-Grams-basiert
- Sagt anhand vorhergegangenen Wörtern nachfolgendes Wort voraus: 2-Grams, 3-Grams
P(w_i| w_{i-1}, w_{i-2})(Trigram),P(w_i| w_{i-1})(Bigram)- Vorteile
- Trainierbar auf großen Textdatensätzen
- Weiche Vorhersage basierend auf Wahrscheinlichkeiten
- Kann direkt mit dem akustischen Modell kombiniert werden
- Nachteile
- Braucht eine große Textdatenbank für jede Domäne
Hidden Markov Model
- Einsatzgebiet: Akustischen Einheiten der Sprache modellieren
- Markov Annahme: Übergangswahrscheinlichkeit hängt nur vom aktuellen Zustand ab
- Evaluation: Forward Algorithmus und Viterbi Algorithmus
- Decoding: Viterbi Algorithmus
- Training: Forward-Backward Algorithmus
Forward-Algorithmus
- Trellis lösen, Aufgabenstellung: Welche Zeichenkette ist wahrscheinlicher?
Viterbi
- Fragestellung: Welche Zustandsreihenfolge ist für eine Zeichenkette am wahrscheinlichsten?
- Auch Forward-Algroithmus und Maximieren statt Aufsummieren
N-Grams
- Nachteil: höhere Ordnung des N-Gramm-Modells -> Mehr Trainingsdaten (Erhöhung deshalb nicht immer möglich)
- Viele Trainingsdaten notwendig um verlässliche Statistiken für alle möglichen Wortfolgen zu bestimmen
- 3-Gramm: P(w_i) = P(w_i|w_i-2,w_i-1)
Wortfehlerrate (WER)
#Ins + #Dels + #Subs
WER = _________________
N
* Nachteil von WER: Gewichtet alle Fehler gleich stark
Logik
Deduktion
Ein Algorithmus, der jede aus einer Wissensbasis folgerbare Aussage auch tatsächlich ableiten kann, heißt vollständig. Alle können abgeleitet werden.
Lassen sich mit einem Algorithmus nur Aussagen ableiten, die auch wirklich aus der Wissensbasis folgen, wird er als korrekt bezeichnet.
Resolution
- Und-Oder-Graph:
A v ~B v ~C->B & C -> A(Körper-Kopf Regel) - Rückwärtsverkettung für Aussagefolgerung: Überprüfen ob gesuchte Aussage aus Fakten (Einzelliterale) folgt
Horn-Klauseln
- Disjunktion von Literalen, von denen höchstens eins positiv ist
- Typen
- Fakt, Axiom (Keine negativen Literale)
- Definition (genau ein positives Literal)
- Integritätseinschränkung (kein positives Literal)
- Nachteil: stellen nur eine Teilmenge der prädikatenlogischen Formeln dar (manche boolsche Funktionen kann man durch Hornklauseln nicht ausdrücken)
DPLL
Bahnplanung
Polygonzerlegung
- Raum in Polygone zerlegen, indem von jeder Hindernisecke aus eine Trennlinie nach oben und unten bis zur nächsten Hinderniskante gezogen wird
- Polygone sind entweder komplett frei oder komplett unpassierbar
- Mittelpunkte jedes Freiraumpolygons sind Knoten im Suchgraph
- A* Suche über Graph
- Nachteil: Bei großen Freiräumen große Polygone, evtl. große Umwege
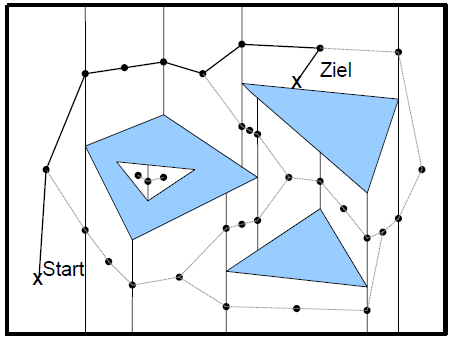
Sichtgraphen
- Ecken sind Knoten des Graphen, Kante zu jedem Knoten der sichtbar ist
- Ränder geometrischer Formen sind ebenfalls Kanten
- Zur Wegsuche im Graph müssen die Kanten gewichtet werden -> Länge der Strecken
- auch in R3 anwendbar, dann aber i.A. nicht mehr kürzeste Wege
Quadtrees
- Aufteilung des Raumes in Quadrate (2D) bzw. Kuben (3D -> Octtrees) adaptiver Größe
- Gesamter Raum als ein Quadrat, dieses wiederum in vier Unterquadrate aufteilen
- Quadrat ist entweder komplett frei, komplett unpassierbar oder gemischt.
- Falls gemischt, wieder unterteilen…
Voronoi-Diagramme
- Ziel: Maximalen Abstand zu Hinternissen halten
- Diagramm teilt Raum so in Flächen ein, dass jedes Hindernis in genau einer Fläche enthalten ist
- Fläche enthält alle Punkte, für die dieses Hindernis das nächstgelegene ist
- Grenzlinien erstellen:
- punktförmige Hindernisse: eine Gerade
- Punkt und Gerade: eine Parabel
- Punkt und endlicher Strecke: eine Parabel im Streifen der Strecke, außerhalb Halbgerade
- zwei Strecken:
- Gerade im Schnitt der Streifen
- Parabel bzgl. Endpunkt in einzelnem Streifen
- Gerade bzgl. Endpunkten außerhalb der Streifen
- ermittelter Weg garantiert maximale Freiheit von Hindernisse, aber evtl. großer Umweg
Potentialfeldmethode
- Keine Überführung der Planungsaufgabe in Graphen
- Stattdessen: Potentialfeld im Konfigurationsraum definieren, darin lokale Suche nach Gradientenabstieg
- Ziel: globales Minimum, mit der Entfernung in alle Richtungen linear ansteigend
- Hindernisse: hohes Potential, von Rändern aus mit der Entfernung kontinuierlich abnehmend
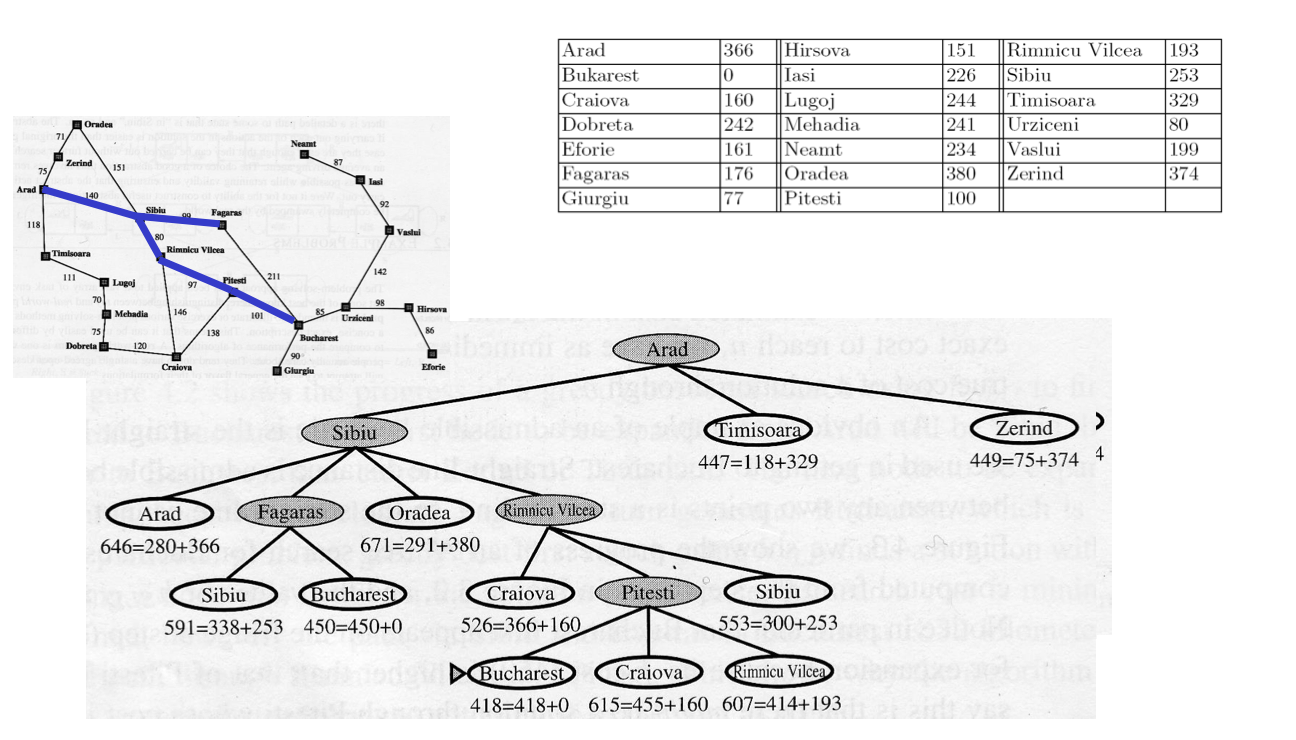
A*-Suche
- Allgemeiner Algorithmus für die heuristikgestützte Suche in Graphen
- Liefert kürzesten Weg zum Ziel
- Effizienz abhängig von Güte der Heuristik
- Expandiert den Knoten, für den die Summe (geschätzte Entfernung zum Ziel) + (bisher zurückgelegte Strecke vom Start) minimal ist
- Es werden immer alle nicht-expandierten Knoten berücksichtigt (nicht nur der aktuelle Ast)
Robotik
(Nicht klausurrelevant!)